Module de codage : détection des obstacles.
Juillet 2020
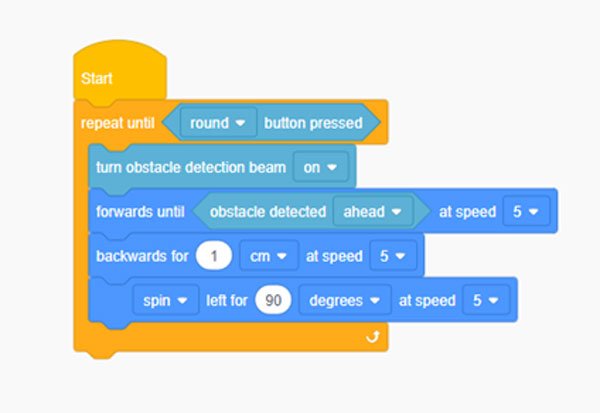
1 - Détection des obstacles simples
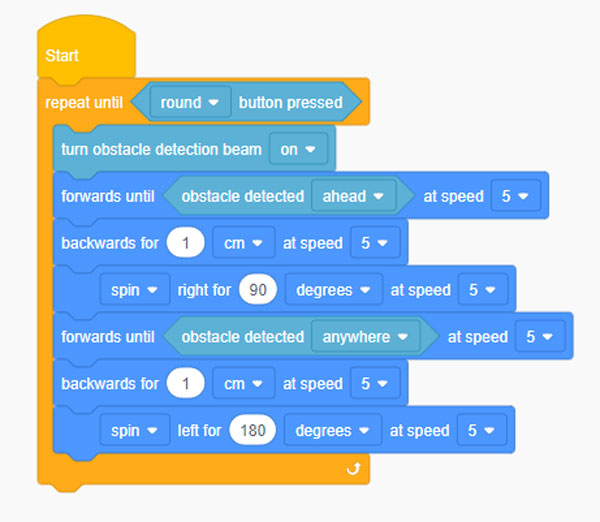
2 - Détection d’obstacle dans tous les cas
A utiliser avec un départ dans un couloir large
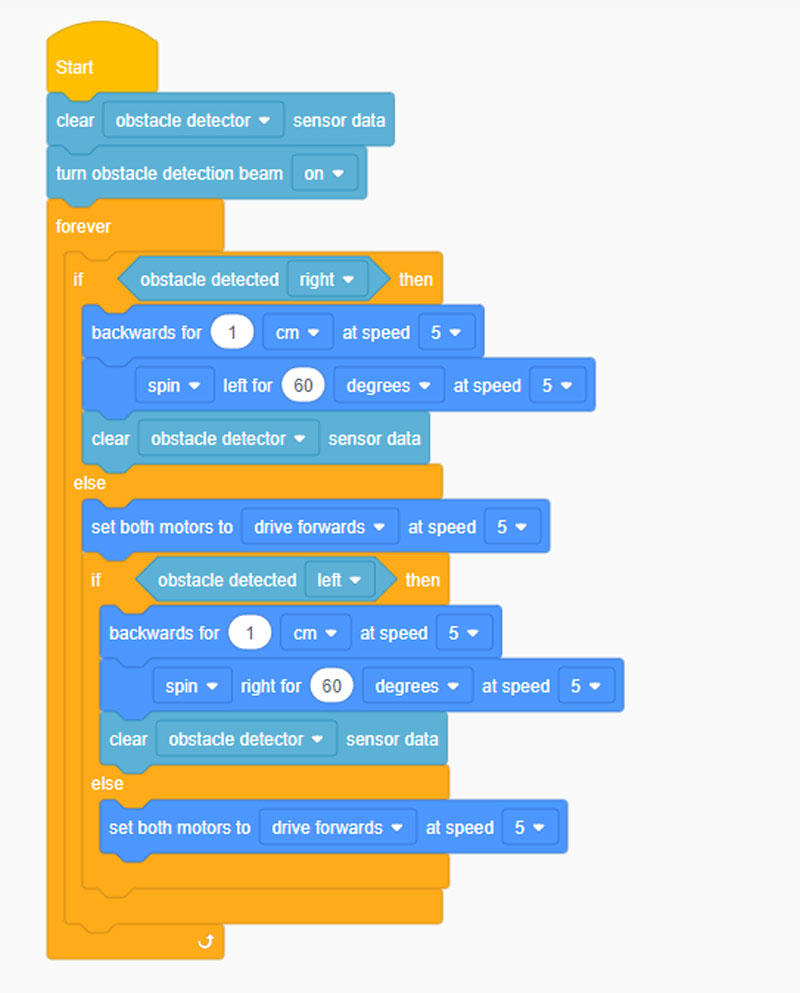
3 - Détection des obstacles et recherche de la direction
Le robot ici doit être placé dans une direction à 45° pour suivre le couloir. Le déplacement se fera en zigzag jusqu’à la recherche d’une ligne droite.
4 - Chargement et déchargement d'un robot
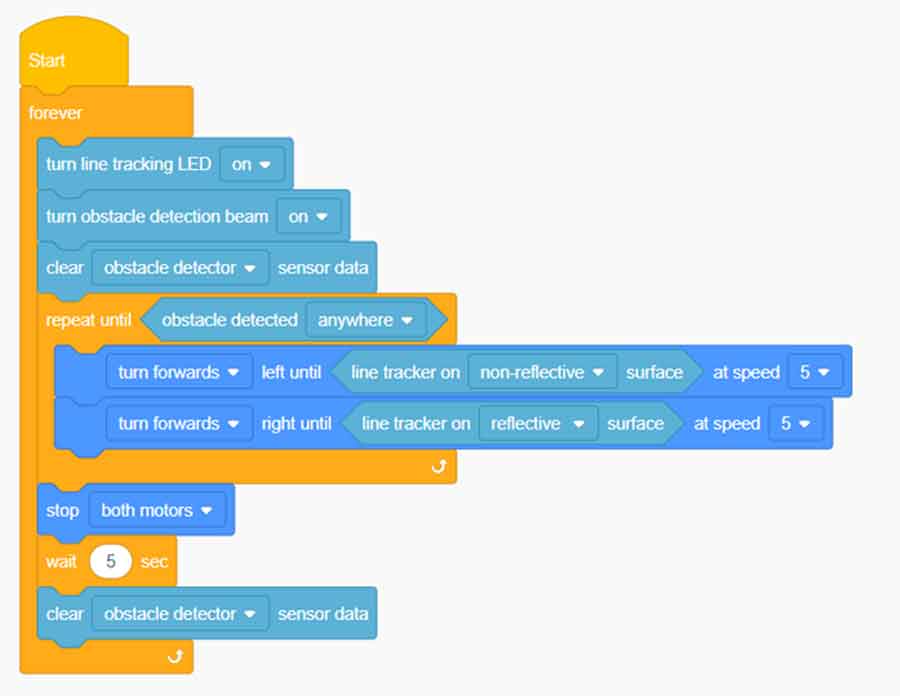
Lorsque le robot est face à une barrière, il s’arrête pour être chargé ou déchargé puis repart après un arrêt de 5 secondes.
